<html>
<script>
function addStylesheet(url)
{
// presentation mode
if (document.createStyleSheet) {
document.createStyleSheet(url);
}
else {
var styles = "@import url('" + url + "');";
var newSS=document.createElement('link');
newSS.rel='stylesheet';
newSS.href='data:text/css,'+escape(styles);
document.getElementsByTagName("head")[0].appendChild(newSS);
}
}
if (location.href.indexOf('action=render') > 0)
{
document.write("<head><title>Presentation</title></head>"); // need this for some browsers for addStylesheet to work
addStylesheet('http://www.w3.org/Talks/Tools/Slidy/slidy.css');
addStylesheet("/skins/monobook/main.css");
addStylesheet("/index.php?title=MediaWiki:Common.css&usemsgcache=yes&action=raw&ctype=text/css&smaxage=18000");
addStylesheet("/index.php?title=MediaWiki:Monobook.css&usemsgcache=yes&action=raw&ctype=text/css&smaxage=18000");
addStylesheet("/index.php?title=-&action=raw&gen=css&maxage=18000&smaxage=0&ts=20070606210926");
document.write('<script src="http://www.w3.org/Talks/Tools/Slidy/slidy.js" type="text/javascript"><' + '/script>');
document.write('<script type="text/javascript">wgBreakFrames = false;<' + '/script>'); // for wikibits.js
document.write('<script src="/skins/common/wikibits.js" type="text/javascript"><' + '/script>');
document.write('<script src="/index.php?title=-&action=raw&smaxage=0&gen=js" type="text/javascript"><' + '/script>');
}
else
{
// wiki mode
if (wgServer)
document.write('<a href="' + wgServer + '/index.php?title=' + wgPageName + '&action=render"><b><em>=> Start web presentation</em></b></a>');
}
</script>
</html>
jcline@ieee.org - Robotics - Let's Do Something "Simple"
- Make biology easier to engineer
- Make biology more reliable to engineer
by:
- Methods: Improving the means and methods for bio/synthetic design;
- Predictability: Improving repeatability and trust of experimental results and procedure;
- Reusability: Engineering biological components and biological tools to be reusable across designs or across experiments.
for:
- Increased productivity
- Less busywork, more Design time
- Less human interaction means less human error
- Decreased financial cost
- More experiments possible per day per person per lab
(Contrary to popular belief, lab techs are not "free")
jcline@ieee.org - Robotics - Let's Do Something "Simple"
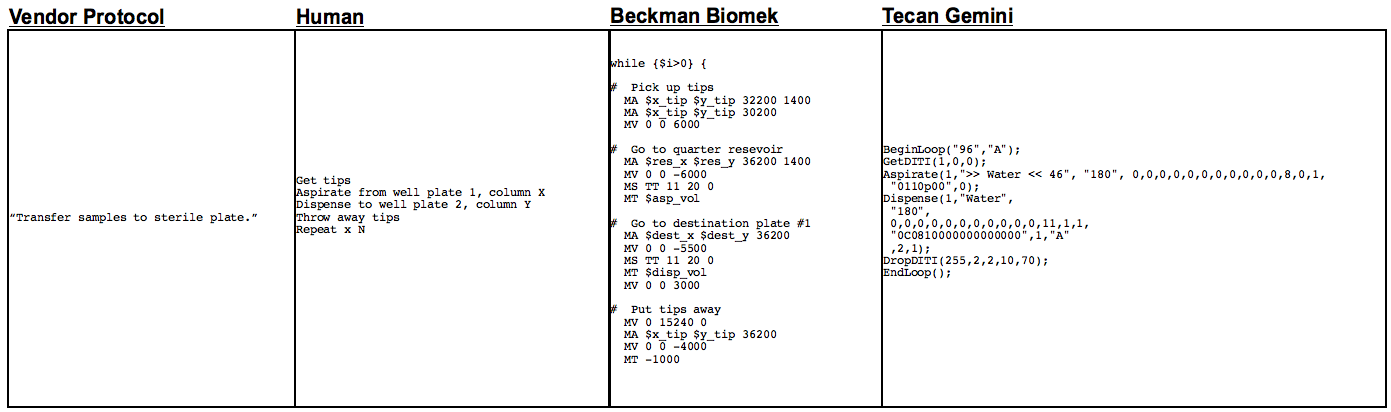
Let's Automate a bio-protocol and remove the busy-work!
- George Church Lab
- "MAGE": A Machine That Speeds Up Evolution
- "A genome-wide approach to genetic engineering greatly speeds the manufacture of bacteria for making drugs and biofuels."
Sounds great!
http://www.technologyreview.com/files/25028/evolution_machine_x220.jpg
- Problem: Little re-usability?
- "It's a great device for that experiment, and that experiment only"
- It's not a general purpose bio-protocol processor.
- Problem: Liquid Connectivity?
- "It's self contained and can't connect to a larger protocol."
- These are scalability and reuse problems.
- Also known as Integration issues (industry slang).
jcline@ieee.org - Robotics - Let's Do Something "Simple"
- Let's Automate a bio-protocol and remove the busy-work!
- This time let's build an arbitrary liquid-handler that can move drops anywhere!
- “AC Electrowetting Actuation of Droplets on a Digital Microfluidic Platform”
- “Rapid Prototyping in Copper Substrates for Digital Microfluidics”
- Problem: The droplets can only be moved by switching electricity by hand.
- U-Toronto & UCLA: (A grad student's hand.)
- Jonathan: I'll use electronics & software.
Jonathan's version
http://biosx.com/88proof/synthetic_biology/blog/wp-content/uploads/2009/06/p6033652w.jpg
http://biosx.com/88proof/synthetic_biology/blog/wp-content/uploads/2009/07/p7023926swc-prototype.jpg
- Problem: Each millimeter of movement for the droplet requires an electrical switch. There are many millimeters to move, so hundreds of switches.
- U-Toronto: "Even LabView makes it too complex."
- The software represents a significant portion of the total system, and doesn't exist yet.
- Problem: The chip only works about 1/3 of the time.
- Well, the physics guys can fix that eventually.
- These are scalability and reuse problems: control system issues and device interconnection issues.
- The fabrication problem will be solved by any one of 10,000 postdocs.
- Even when fabrication is solved, the control system problem still needs a solution.
jcline@ieee.org - Robotics - Let's Do Something "Simple"
- Let's Automate a bio-protocol and remove the busy-work!
- This time let's use a big robot! It can do anything!
- (at least, it costs enough, so it should be able to do anything.)
http://88proof.com/biotech/img/jcline-tecan-genesis-2000-1sw.jpg
- Problem: It can really only to certain things that the vendor allows.
- In fact, it can only move certain objects and perform a few operations.
- And, some of those operations fail, too.
- And, the vendor's software can't check for failure.
- Failure requires human intervention, or can ruin the experiment.
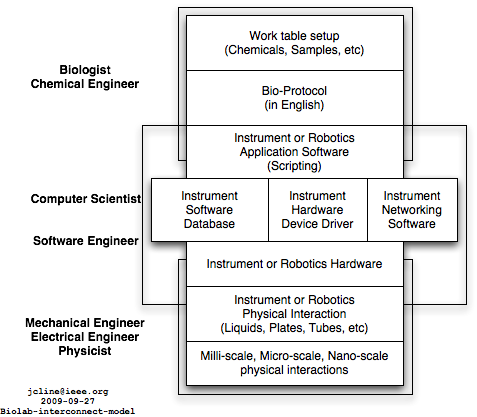
jcline@ieee.org - Robotics - User/Software/Hardware Model
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}