|
|
| (18 intermediate revisions by the same user not shown) |
| Line 1: |
Line 1: |
| {{Slides}}
| |
| {{:OpenWetWare:Presentations/default.css}}
| |
|
| |
|
| http://c.statcounter.com/5196544/0/c9629947/1/0.png
| | Previously this was a Slidey presentation but OpenWetWare no longer supports that rendering, but the content is still below. |
| | | |
| <div class="background">
| |
| | |
| http://c.statcounter.com/5196544/0/c9629947/1/0.png
| |
| </div>
| |
|
| |
|
| <div class="slide cover"> | | <div class="slide cover"> |
| <br clear="all" /> | | <br clear="all" /> |
| =Microbiology Sensor-Heat Controller Board: The Sensomatic= | | =Microbiology Sensor/Controller Board: The Sensomatic= |
|
| |
|
| [http://openwetware.org/wiki/User:Jonathan_Cline Jonathan Cline] | | [http://openwetware.org/wiki/User:Jonathan_Cline Jonathan Cline] |
| Line 17: |
Line 11: |
| [mailto:jcline@ieee.org jcline@ieee.org] | | [mailto:jcline@ieee.org jcline@ieee.org] |
|
| |
|
| 2009
| | © 2013 |
|
| |
|
| http://88proof.com/img/JCLINE-BUSINESS-CARD-320.png
| | |
| </div>
| |
|
| |
|
|
| |
|
| Line 43: |
Line 36: |
| ** More experiments possible per day per person per lab | | ** More experiments possible per day per person per lab |
|
| |
|
| (Contrary to popular belief, lab techs are not "free") | | (Contrary to popular belief, lab techs & their time are not "free") |
| </div> | | </div> |
|
| |
|
| Line 50: |
Line 43: |
|
| |
|
| Let's perform a cell culturing experiment and isolate some bacteria for bioengineering targets! | | Let's perform a cell culturing experiment and isolate some bacteria for bioengineering targets! |
| * Cory Tobin 2012 (LA Biohackers ; Cal Tech) | | * Cory Tobin 2012-2013 (LA Biohackers ; Cal Tech) |
| ** Nitrogenase Directed Evolution | | ** [http://wiki.biohackers.la/Nitrogenase_Directed_Evolution Nitrogenase Directed Evolution] |
| | *** Plants need nitrogen in the form of ammonia, nitrates or nitrites (artificially via 'ammonium nitrate fertilizers') |
| *** "The directed evolution of a thermophilic nitrogenase ... so that productivity of farmland crops would not be dependent on a non-renewable resource whose price can fluctuate drastically due to speculation, weather or global conflicts." | | *** "The directed evolution of a thermophilic nitrogenase ... so that productivity of farmland crops would not be dependent on a non-renewable resource whose price can fluctuate drastically due to speculation, weather or global conflicts." |
|
| |
|
| ''Sounds great!'' | | ''Sounds great!'' |
|
| |
|
| http://wiki.biohackers.la/files/thumb/2/2b/N2-ase.png/500px-N2-ase.png | | http://wiki.biohackers.la/files/thumb/2/2b/N2-ase.png/500px-N2-ase.png [http://wiki.biohackers.la/Nitrogenase_Directed_Evolution Link] |
| | |
| | </div> |
| | |
| | <div class="slide"> |
| | = Engineered Biology - Let's Do Something "Simple"= |
|
| |
|
| Assuming we've got a potential soil sample which might contain the desired bacterial strain.. | | Assuming we've got a potential soil sample which might contain the desired bacterial strain.. |
| | | |
| * Problem : Culture the soil samples which might grow something. | | * Problem - Culture specific soil samples which might grow something. |
| * Problem : Identify if something grows. | | * Problem - Identify if something grows. |
| * Problem : Isolate the bacteria which grows. | | * Problem - Isolate the bacteria which grows. |
| * Problem : Identify if the bacteria is the desired strain. | | * Problem - Identify if the bacteria is the desired strain. |
| * Problem : Lather, rinse, repeat until the sequence matches. | | * Problem - Lather, rinse, repeat until the sequence matches. |
| * Then finally begin the real experiment with the target bacteria!
| | |
| | Then finally begin the '''real''' experiment with the target bacteria! |
| | |
|
| |
|
| * These are lab automation and scalability problems.
| | These are lab automation and scalability problems. |
| * Also known as '''Environment Bring-Up Issues''' (industry slang). | | * Also known as '''Bring-Up Issues''' (industry slang). |
|
| |
|
| </div> | | </div> |
| Line 77: |
Line 78: |
| = Engineered Biology - Let's Do Something "Simple"= | | = Engineered Biology - Let's Do Something "Simple"= |
|
| |
|
| * Let's Automate this as a bio-protocol and remove the busy-work!
| | Let's Automate this as a bio-protocol and remove the busy-work! |
| ** This time let's build an arbitrary liquid-handler that can move drops anywhere!
| | |
| *** ¿AC Electrowetting Actuation of Droplets on a Digital Micro¿uidic Platform¿
| | Cory's First Solution (Image Copyright 2012 Cory Tobin) |
| ***¿Rapid Prototyping in Copper Substrates for Digital Microfluidics¿ | | |
| * Problem: The droplets can only be moved by switching electricity by hand. | | * Small scale bioreactor with valves |
| ** U-Toronto & UCLA: (A grad student's hand.)
| | * Arduino breadboarded with various electronics and hand-wired connections. |
| ** Jonathan: I'll use electronics & software.
| | |
| ===Jonathan's version===
| | http://biosx.com/88proof/synthetic_biology/blog/wp-content/uploads/2013/03/Cory_Tobin_Nitrogenase_Directed_Evolution_1.png |
|
| | |
| http://biosx.com/88proof/synthetic_biology/blog/wp-content/uploads/2009/06/p6033652w.jpg | | '''"Found out the arduino has all these limitations and does not work here."''' |
| | |
| | Spent months.. to bring up an environment to do the real experiment. |
| | |
| | </div> |
| | |
| | <div class="slide"> |
| | = Engineered Biology - Let's Do Something "Simple"= |
| | |
| | Cory's Second Solution (Image Copyright 2012 Cory Tobin) |
| | |
| | * Cheap Wal-mart insulated cooler. |
| | * Give up on electronics and do everything by hand. |
| | ** Measure and adjust temperature multiple times per day. |
| | ** Refill reagents every other day. |
| | |
| | '''"Finally successful, one time through. Same amount of effort to run through again."''' |
| | |
| | * High maintenance. |
| | * Human error. |
|
| |
|
| http://biosx.com/88proof/synthetic_biology/blog/wp-content/uploads/2009/07/p7023926swc-prototype.jpg | | http://biosx.com/88proof/synthetic_biology/blog/wp-content/uploads/2013/03/Cory_Tobin_Nitrogenase_Directed_Evolution_2.png |
|
| |
|
| * Problem: Each millimeter of movement for the droplet requires an electrical switch. There are many millimeters to move, so hundreds of switches.
| |
| ** U-Toronto: '''"Even LabView makes it too complex."'''
| |
| ** The software represents a significant portion of the total system, and doesn't exist yet.
| |
| * Problem: The chip only works about 1/3 of the time.
| |
| ** Well, the physics guys can fix that eventually.
| |
|
| |
|
|
| |
|
| * These are scalability and reuse problems: '''control system''' issues and device interconnection issues.
| |
| * The fabrication problem will be solved by any one of 10,000 postdocs.
| |
| ** Even when fabrication is solved, the ''control system'' problem still needs a solution.
| |
| </div> | | </div> |
|
| |
|
| Line 107: |
Line 119: |
| = Engineered Biology - Let's Do Something "Simple"= | | = Engineered Biology - Let's Do Something "Simple"= |
|
| |
|
| === Jonathan's version === | | ===Jonathan Cline's version: The Sensomatic=== |
| | |
| | |
| | * Use industrial-grade, low cost electronics; not Arduino |
| | * Simple programmability, set up by any computer |
| | |
| | '''Achieve simplicity, integration of function, and low cost''' |
| | |
| | '''Solve a specific problem''' |
| | |
| | Sense and Control: |
| | * Heater element |
| | * Temperature |
| | * CO2 |
| | * OD |
| | * Shaker |
| | * Pump |
| | * 120VAC outlet |
|
| |
|
| Electrowetting using Copper PCB and solid state switches
| |
|
| |
|
| http://88proof.com/biotech/img/jcline-ewod-2090711s.JPG
| |
|
| |
|
| * Only marginal success
| |
| * Software is a big issue - for device control
| |
| * Too difficult to debug both software & hardware at the same time
| |
| ** Improve software first (easier to debug); come back to hardware later
| |
| ** Develop software with ''working hardware''
| |
| </div> | | </div> |
|
| |
|
|
| |
|
| <div class="slide"> | | <div class="slide"> |
| | |
| = Engineered Biology - Let's Do Something "Simple"= | | = Engineered Biology - Let's Do Something "Simple"= |
|
| |
|
| * Let's Automate a bio-protocol and remove the busy-work!
| | ===Jonathan Cline's version: The Sensomatic=== |
| ** This time let's use a big robot! It can do anything!
| | |
| *** (at least, it costs enough, so it should be able to do anything.)
| | |
| | http://88proof.com/synthetic_biology/blog/wp-content/uploads/2009/03/img_0012sm.jpg |
| | http://88proof.com/synthetic_biology/blog/wp-content/uploads/2013/03/mq5-sensor.jpg |
| | http://88proof.com/synthetic_biology/blog/wp-content/uploads/2013/03/LM35.jpg |
| | http://88proof.com/synthetic_biology/blog/wp-content/uploads/2013/03/ssr-10636-01_i_ma.jpg |
|
| |
|
| http://88proof.com/biotech/img/jcline-tecan-genesis-2000-1sw.jpg
| | * Low cost electronics |
| | * Industry standard, available in volume |
| | * Open source design |
| | * Replaceable components |
| | * '''Multiple functions on one device''' |
|
| |
|
| * Problem: It can really only to certain things that the vendor allows.
| |
| ** In fact, it can only move certain objects and perform a few operations.
| |
| *** And, some of those operations fail, too.
| |
| **** '''And''', the vendor's software can't check for failure.
| |
| ***** Failure requires human intervention, or can ruin the experiment.
| |
| * Problem: Biologists have to Program it. '''Biologists do not program.'''
| |
|
| |
|
| </div> | | </div> |
| | |
|
| |
|
|
| |
|
| Line 143: |
Line 169: |
| <div class="slide"> | | <div class="slide"> |
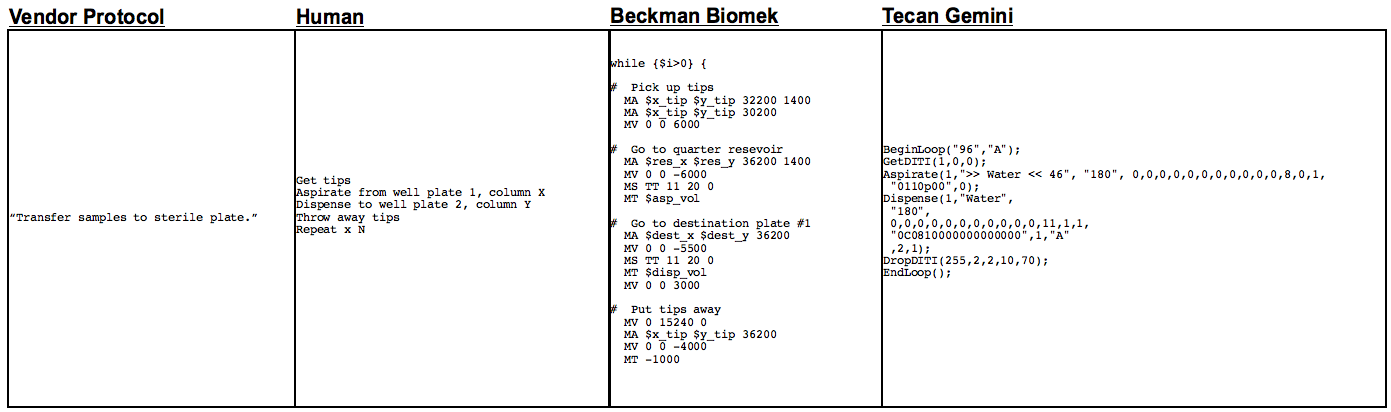
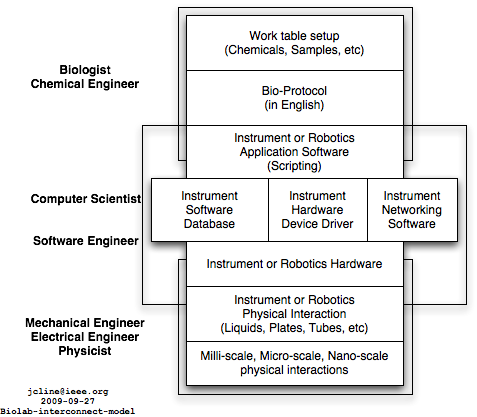
| = Engineered Biology - User/Software/Hardware Model= | | = Engineered Biology - User/Software/Hardware Model= |
| | |
| | '''Prior Art''' (non-integrated, single function devices) |
|
| |
|
| http://88proof.com/biotech/img/Biolab-languages1.png | | http://88proof.com/biotech/img/Biolab-languages1.png |
|
| |
|
| For Tecan, the commands break down even further, into High-level script commands (shown) and low level device operations unique to each device.
| | Industry-standard robotic automation systems (like Tecan or Beckman) use proprietary, high-level script commands (shown) and proprietary low level device operations unique to each device. |
| </div> | | </div> |
|
| |
|
| Line 155: |
Line 183: |
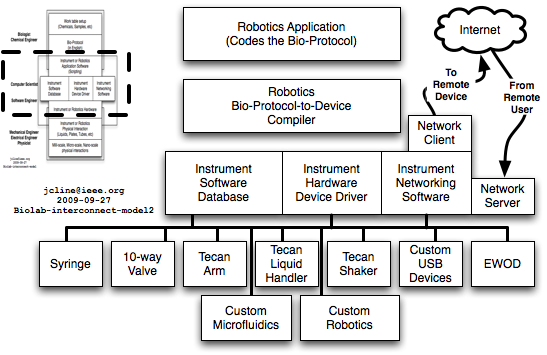
| http://88proof.com/biotech/img/Biolab-interconnect-model.png | | http://88proof.com/biotech/img/Biolab-interconnect-model.png |
|
| |
|
| *The current usage for devices is monolithic: each device is programmed separately | | *Today's usage for devices is monolithic: each device is programmed separately |
| **Each device has it's own programming method | | **Each device has it's own programming method |
| **Difficult to re-use software written for one device, on another device | | **Difficult to re-use software written for one device, on another device |
| Line 331: |
Line 359: |
| </div> | | </div> |
|
| |
|
|
| |
| <div class="slide">
| |
| =Engineered Biology - Data Format - Environmental data=
| |
|
| |
|
| |
| *Each device has environment data associated with operating it.
| |
| ** Points in space
| |
| ** Containers
| |
| ** Solids, liquids, gases
| |
| *Storing that data in an easily readable and editable format is very important for software re-use.
| |
| * YAML Format is Human readable, Human editable and Computer Readable
| |
| | | |
| <pre class="incremental">
| |
| %YAML 1.1
| |
| ---
| |
| version: 2009-09-04
| |
| tecan:
| |
| genesis:
| |
| points:
| |
| roma0:
| |
| magnet-hover: '14056,1850,980,1800'
| |
| magnet-place: '14056,1850,687,1800'
| |
| sampletray-hover: '14057,2828,980,1800'
| |
| sampletray-place: '14057,2828,582,1800'
| |
| shaker-hover: '1780,3569,1535,1800'
| |
| shaker-put: '1780,3569,865,1800'
| |
| shaker-take: '1780,3569,865,1800'
| |
| shakerlock-1: '1762,1177,1535,900'
| |
| shakerlock-2: '1762,1177,815,900'
| |
| shakerlock-3: '1191,1177,808,900'
| |
| shakerlock-4: '1762,1177,815,900'
| |
| shakerlock-5: '1762,1177,1535,900'
| |
| shakerlock-6: '1780,3569,1535,1800'
| |
| shakerlock-hover: '1780,3569,1535,1800'
| |
| HOME1: '11165,2525,980,1800'
| |
| ...
| |
| </pre>
| |
|
| |
|
|
| |
|
|
| |
| </div>
| |
|
| |
| <div class="slide">
| |
| =Engineered Biology - What's Running Now=
| |
|
| |
| * General purpose software to control FIAlab syringe pump and 10-way valve
| |
| * General purpose software to control part of the Tecan arm
| |
| * Network operation of the Tecan; run a bio-protocol from your desk
| |
| ** Get the current operational status in real time for current experiment
| |
| *'''Solid foundation; much more to be done'''
| |
| * ''Lab Automation'' mailing lists have already responded with high interest
| |
| * 2 releases already made to the public internet software archive for Perl (CPAN)
| |
|
| |
| The end user writes a simple Perl application to control all devices and robotics.
| |
| * Perl is '''the #1 bioinformatics language.'''
| |
|
| |
| <pre class="incremental">
| |
|
| |
| sub Main {
| |
| $hw = Robotics::Tecan->new(
| |
| connection => 'network,Robotics::Tecan::Genesis,genesis0',
| |
| token => 'M1',
| |
| serveraddr => 'heavybio.dyndns.org:8088',
| |
| password => $ENV{'TECANPASSWORD'});
| |
|
| |
| $hw->attach("o");
| |
| $_ = $hw->status();
| |
| exit -2 if !/IDLE/i;
| |
|
| |
| # Load worktable
| |
| $hw->configure("client-traymove1test.yaml");
| |
|
| |
| my @path = (
| |
| "shakerlock-hover",
| |
| "shakerlock-1",
| |
| "shakerlock-2",
| |
| "shakerlock-3",
| |
| "shakerlock-4",
| |
| "shakerlock-5",
| |
| "shakerlock-hover"
| |
| );
| |
| checkok $hw->move_path("roma0", @path);
| |
|
| |
| checkok $hw->move("roma0", "shaker-take");
| |
| checkok $hw->grip("roma0");
| |
| checkok $hw->move("roma0", "shaker-hover");
| |
|
| |
| checkok $hw->move("roma0", "sampletray-hover");
| |
| checkok $hw->move("roma0", "sampletray-place");
| |
| checkok $hw->grip("roma0", 'o', 120);
| |
| checkok $hw->move("roma0", "sampletray-hover");
| |
| checkok $hw->park("roma0");
| |
|
| |
| checkok $hw->park("liha");
| |
|
| |
|
| |
| </pre>
| |
| | | |
|
| |
| </div>
| |
|
| |
| <div class="slide">
| |
| =Engineered Biology - What's Running in "Upcoming Weeks"=
| |
|
| |
| * General purpose software to control FIAlab
| |
| * General purpose software to control Tecan arm & Tecan liquid handler & Tecan peripherals
| |
| * Network operation of all of the above; run a bio-protocol ''entire flow'' from your desk
| |
| ** And get the data results back from MATLAB in '''real time'''
| |
| * Advanced error handling for Tecan bio-protocol problems: automatic re-trying
| |
| * Complete suggested bio-protocol as initial high-throughput run
| |
|
| |
| Medium Term Goal
| |
|
| |
| * Prove system across multiple & varied bio-protocols
| |
| ** Swap out the existing devices for upgraded or custom versions.
| |
| ** Use simple language to control the bio-protocol
| |
| * Improve maintainability of both software applications & hardware designs
| |
| * Allow remote users to access local hardware (as a lab service)
| |
| ** A new Robot Scientist is born
| |
|
| |
| Long Term Goal
| |
|
| |
| * Run a complete bio-protocol ''using the English language''
| |
| ** '''Clarification: limited bio-latin-english'''
| |
|
| |
| </div>
| |
|
| |
|
| |
| <div class="slide">
| |
| =Engineered Biology - Benefits=
| |
|
| |
| *Write scripts into the framework to build up scale and reuse; rather than typical stand-alone scripts which are 1-time throw-away
| |
| *Allows many devices to be controlled from the same user program ("hardware integration")
| |
| *Allows device operations not supported by the vendor
| |
| ** This includes much better error handling & re-trying
| |
| *Allows abstraction of the devices: swap out one device for another
| |
| **Removes vendor lock-in, creating more competitive forces to drive innovation among various devices
| |
| *Plug in '''new custom devices,''' can quickly operate with same user program
| |
| *Pipe data to/from MATLAB, the web, the wiki, .csv, others ("data integration")
| |
| *Network operation
| |
| **The controller PC will miss fewer commands since vendor application does not take CPU time
| |
| **The user PC doesn't have to be Windows to run a device (many benefits there)
| |
| **The user can access device status and device output from anywhere (lab or home)
| |
| **Built-in network security
| |
| *The user can program complex algorithms using multiple devices, creating a control system with feedback to optimize a protocol or make arbitrary decisions
| |
| **The "Robot Scientist" was claimed to have identified new targets "on it's own" - using data feedback and prediction; smart algorithms should be possible
| |
| </div>
| |
|
| |
|
| |
| <div class="slide">
| |
| =Engineered Biology - Benefits=
| |
|
| |
| Example devices insertable into the Robotics 'flow'
| |
|
| |
| * Inkjet piezo-heads - pL or nL droplets, gradients, etc
| |
| * Alternative substrates vs. well plates - CDs, other?
| |
| * Millifluidics (Peter)
| |
| * Physical handling (repetitive tasks) - stuff with motors for plate fetch & store
| |
| * other?
| |
|
| |
| </div>
| |
|
| |
|
| |
|
| |
| <div class="slide">
| |
| =Engineered Biology - Protolexer=
| |
|
| |
| Let's Do Something "Simple" : Revisited
| |
|
| |
| '''Just Use English.'''
| |
|
| |
| * Feed the protocol directly to the computer.
| |
| ** Computers ''are'' smart enough.
| |
| * The software knows what devices are attached or available on the network.
| |
| * '''Integrate''' the devices together into a long chain of bio-operations.
| |
| ** Complain if bio-protocol requires device that is not available (Dependency checking.)
| |
| * Bio-protocols have fairly standardized formats and standardized language.
| |
| ** Or can be, with human editing of the English, and a human quickly verifying the "compiled" result before robotics operation.
| |
|
| |
| If the computer can't understand a bio-protocol, '''then the bio-protocol is ambiguous and should be re-written anyway'''
| |
|
| |
| http://biosx.com/88proof/synthetic_biology/blog/wp-content/uploads/2009/06/protolexer1.png
| |
|
| |
| </div>
| |
|
| |
|
| |
| <div class="slide">
| |
| =Engineered Biology - Data Format - Bio-protocols=
| |
|
| |
| <pre >
| |
|
| |
| %YAML 1.1
| |
| ---
| |
| protocol: Mate-Paired Library Preparation for Sequencing
| |
| methods:
| |
| - &standard-purify purify with column:
| |
| - &cp1 Add 3 volumes of Buffer QG and 1 volume of isopropyl alcohol to the sheared
| |
| DNA. If the color of the mixture is orange or violet, add 10uL of 3M sodium
| |
| acetate, pH5.5 and mix. The color turns yellow. The pH required for efficient
| |
| adsorption of the DNA to the membrane is <= 7.5.
| |
|
| |
| - &cp2 Apply 750uL of sheared DNA in Buffer QG to the column(s). The maximum
| |
| amount of DNA that can be applied to a QIAquick column is 10ug. Use more
| |
| columns if necessary.
| |
|
| |
| - &cp3 Let the column(s) stand for 2 minutes at room temperature.
| |
|
| |
| - &cp4 Centrifuge the column(s) at >= 10,000g (13,000 rpm) for 1 minute, then discard
| |
| the flow-through.
| |
|
| |
| - &cp5 Repeat steps 2 and 4 until the entire sample has been loaded onto the column(s).
| |
| Place the QIAquick column(s) back into the same collection tube(s).
| |
|
| |
| - &cp6 Add 750uL of Buffer PE to wash the column(s).
| |
|
| |
| - &cp7 Centrifuge the column(s) at >= 10,000g (13,000 rpm) for 2 minutes, then discard
| |
| the flow-through. Repeat to remove residual wash buffer.
| |
|
| |
| - &cp8 Air-dry the column(s) for 2 minutes to evaporate any residual alcohol. Transfer
| |
| the column(s) to clean 1.5-mL LoBind tube(s).
| |
|
| |
| - &cp9 Add 30uL of Buffer EB to the column(s) to elute the DNA and let the column(s)
| |
| stand for 2minutes.
| |
|
| |
| - &cp10 Centrifuge the column(s) at >= 10,000g (13,000 rpm) for 1 minute.
| |
|
| |
| - &cp11 Repeat steps 9 and 10.
| |
|
| |
| - &cp12 If necessary, pool the eluted DNA.
| |
|
| |
| - &bead-purify purify with magbeads:
| |
| - &bp1 Add 100uL of DNA to 95uL of magbeads.
| |
|
| |
| - &bp2 Vortex at 1,000RPM for 1 minute.
| |
|
| |
| - &bp3 Incubate on magnets for 300 seconds at room temperature to allow DNA to
| |
| bind to beads and beads to settle.
| |
|
| |
| - &bp4 Remove supernatant while beads are magnetized.
| |
|
| |
| - &bp5 Elute while beads are magnetized using 100uL of EtOH.
| |
| Pause for 90 seconds during each wash to allow beads to settle.
| |
| Allow EtOH to evaporate until beads are dry and
| |
| cracks are visible in the bead surface.
| |
|
| |
| - &bp6 Resuspend with 15 uL Buffer xx to resuspend beads.
| |
|
| |
| - &bp7 Vortex at 1,000RPM for 20 seconds.
| |
|
| |
| - &bp8 Incubate for 200 seconds on magnets at room temperature.
| |
|
| |
| - &bp9 Save the eluted DNA.
| |
| </pre>
| |
|
| |
| * Easy to edit (it's text with indenting)
| |
| * Easy to read (no crazy formatting words)
| |
| * Very easy to share
| |
| ** Standardized format
| |
| ** Self-contained, no extra files needed
| |
| * Mostly easy to learn
| |
| * Easy for computers to read, process, write, share
| |
| * Defined in YAML
| |
| </div>
| |
|
| |
|
| |
|
| |
| <div class="slide">
| |
| =Engineered Biology - Competing Method/Prior Art: BioStream (MIT)=
| |
|
| |
| "Towards a High-Level Programming Language for Standardizing and Automating Biology Protocols"
| |
|
| |
| *"Abstraction Layers for Scalable Microfluidic Biocomputers", William Thies , John Paul Urbanski , Todd Thorsen , and Saman Amarasinghe, Computer Science and Artificial Intelligence Laboratory, Hatsopoulos Microfluids Laboratory, Massachusetts Institute of Technology
| |
|
| |
| * Defines "high level" (like Java/C++) language for describing protocols
| |
| * Can take some standardized English protocols as input
| |
| * Can automatically generate the "high level language" for the computer
| |
| * Can output a human-readable clean English bio-protocol
| |
| ** This is a "Validated-clean" version of original bio-protocol
| |
| </div>
| |
|
| |
|
| |
| <div class="slide">
| |
| =Engineered Biology - Competing Method/Prior Art: BioStream (MIT)=
| |
|
| |
| BioStream "clean English output" for '''[http://openwetware.org/wiki/DNA_extraction_from_tissue '''DNA extraction from tissue protocol]'''
| |
|
| |
| http://88proof.com/biotech/img/Biostream-DNA%20extraction%20from%20tissue%20protocol-English-Output.png
| |
|
| |
| </div>
| |
|
| |
|
| <div class="slide"> | | <div class="slide"> |
| =Robotics - Competing Method: BioStream (MIT)= | | =Engineered Biology - Competing Method/Prior Art: BioBoard (Noisebridge)= |
|
| |
|
| "Towards a High-Level Programming Language for Standardizing and Automating Biology Protocols"
| | [https://www.noisebridge.net/wiki/BioBoard BioBoard] |
|
| |
|
| BioStream "high level language" for '''[http://openwetware.org/wiki/DNA_extraction_from_tissue '''DNA extraction from tissue protocol]'''
| | "an Arduino-controlled sensor package that allow users to monitor a range of physiochemical factors related to microbiological processes" |
|
| |
|
| http://88proof.com/biotech/img/Biostream-DNA%20extraction%20from%20tissue%20protocol-Source-Output.png | | http://88proof.com/synthetic_biology/blog/wp-content/uploads/2013/03/noisebridge-bioboard-450px-NIRprobe6.jpg |
| | http://88proof.com/synthetic_biology/blog/wp-content/uploads/2013/03/BioBoardAppNewProject.png |
|
| |
|
|
| |
|
| </div> | | </div> |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}